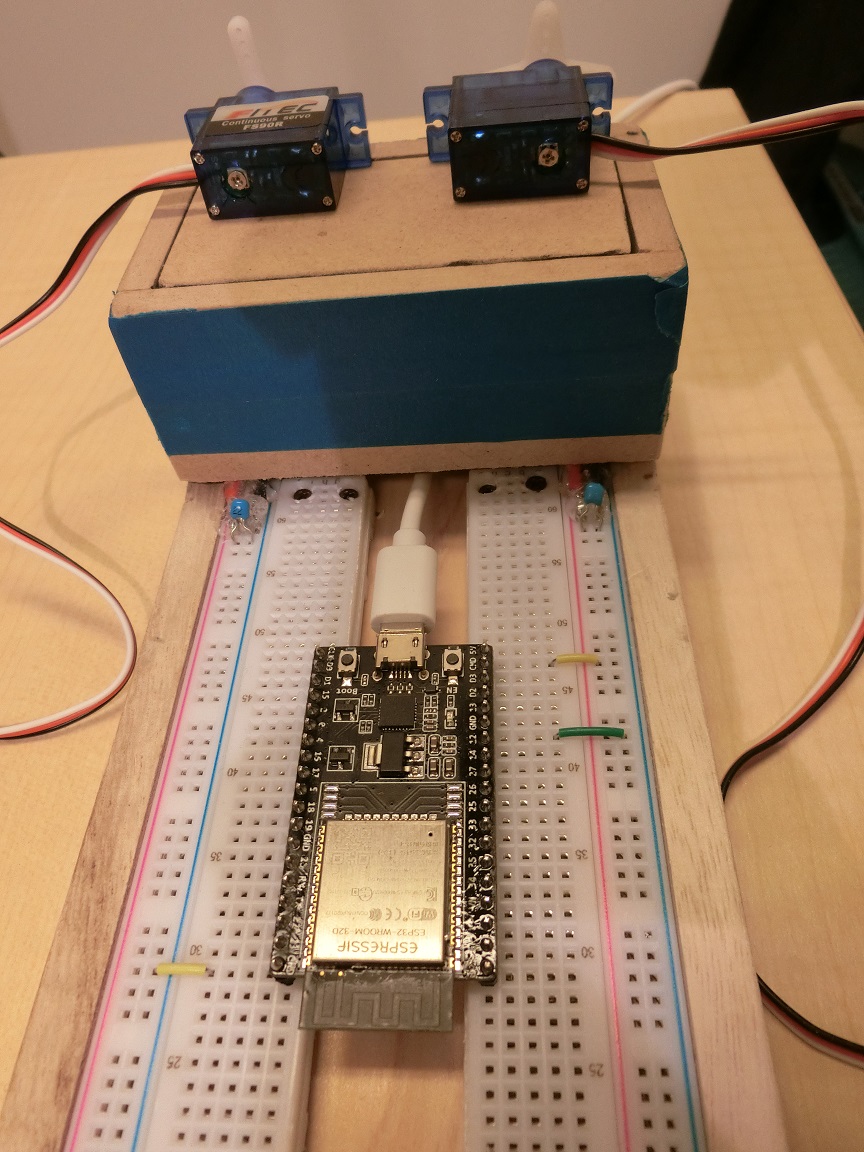
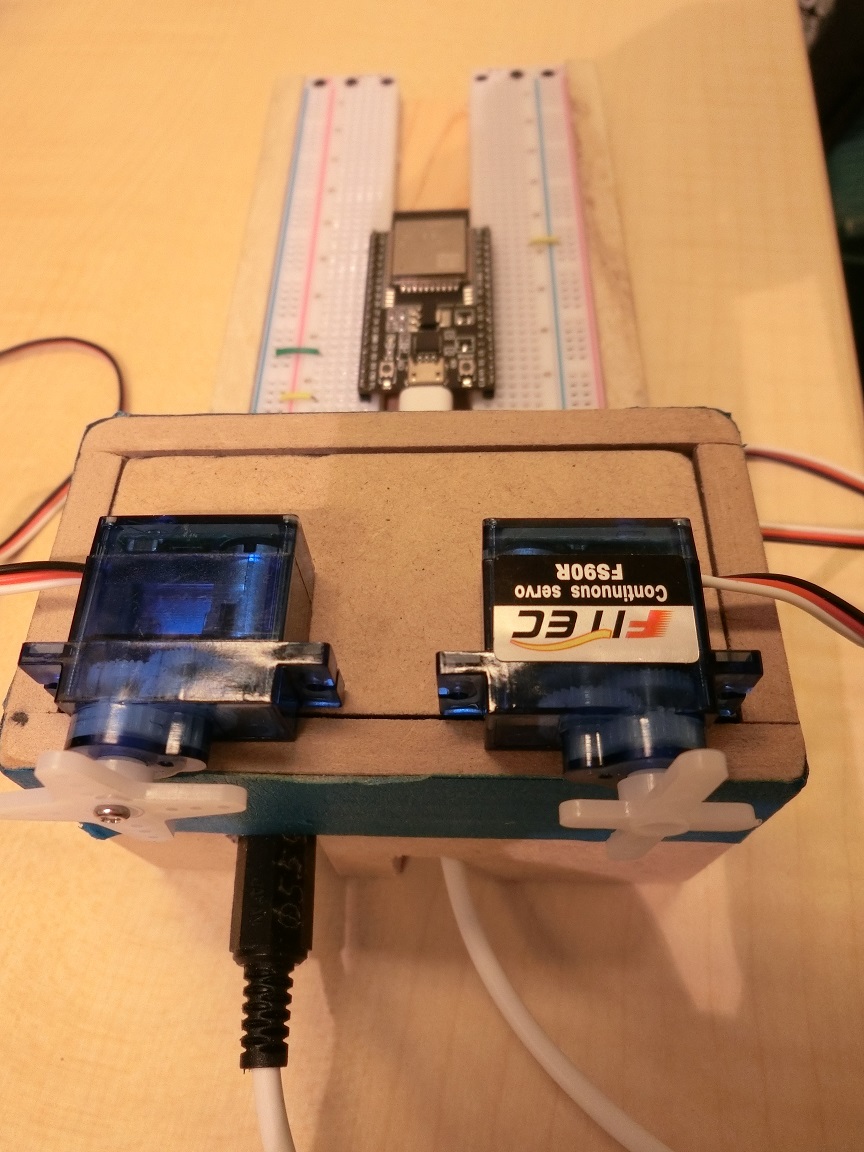
確認用治具として下記のような物を製作しました。BOX内は5V、3.3Vの電源が入っています。
使用するサーボモーターは連続回転式サーボモーターです。
サーボ1個を制御するスケッチ例です。
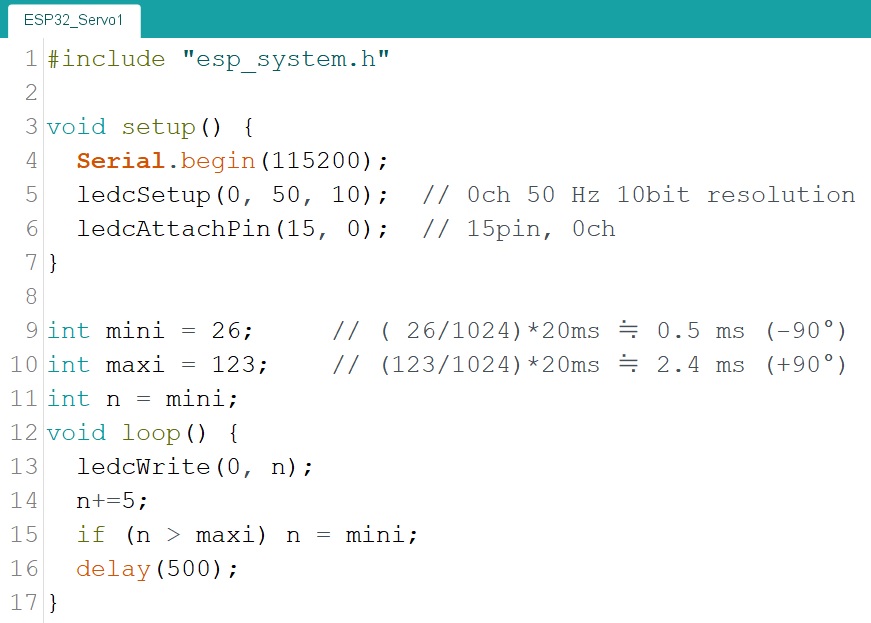
連続回転サーボでは、+90度は「正転最高回転」、-90度は「逆転最高回転」となります。
上記スケッチを少し改造して、よりスムースな動きと正転、逆転の動きもスムースな動きに改造します。
2個のサーボを動かすと2個とも動作が不安定でプログラム通り動いてくれません。色々プログラムを見直したりPWMとして使えるピン、使えないピンが
有るのかを調べようとしましたが、1個づつならプログラム通りに動くのでどちらのピンもPWMが使えているしプログラムも間違いないということで、
最終手段でオシロスコープで波形チェックしたら下記の事が解りました。
まずは2個のサーボ制御するスケッチ例です。
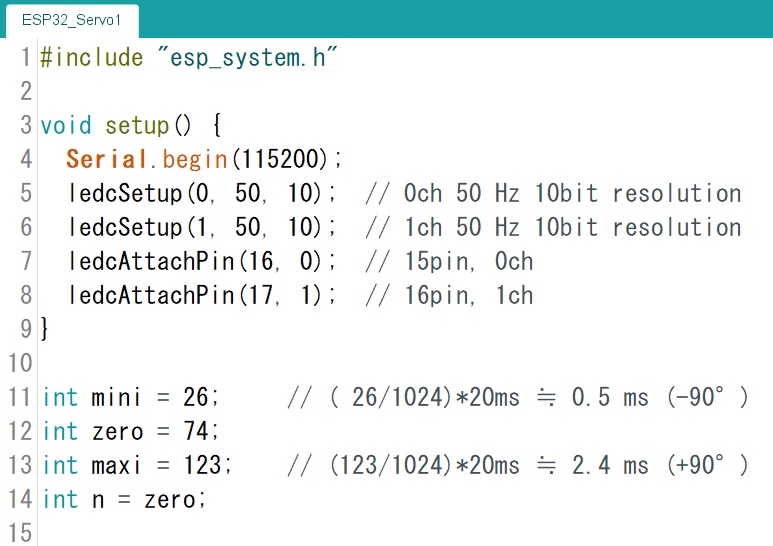
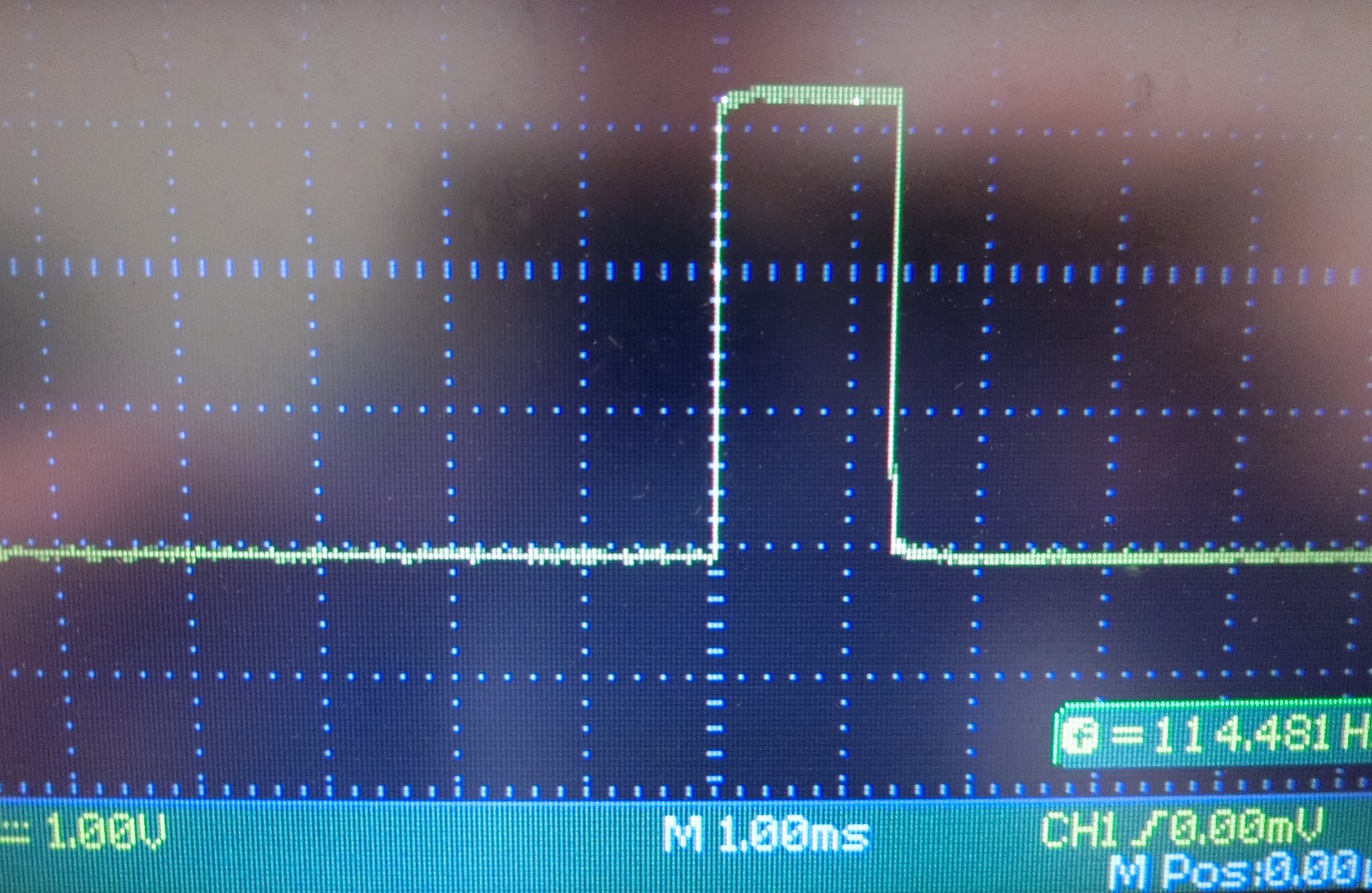
各ピン(16ピン、17ピン)のサーボ制御PWM波形(20ms周期)、電圧はESPから直接なので「3.3V」となっています。

1発ごとの波形の時間は、0.5ms~2.4msで下記波形は、ほぼ停止状態の波形で約1.4ms程度となっています。
100均で売られているUSB充電アダプターで使用すると誤動作します。(電源容量不足)
下記波形は、一度電源からアダプターを抜いて再度差し込み動作させた電源電圧波形で、サーボが起動するとき2.5V程度まで電源電圧(5V)が低下して
います。
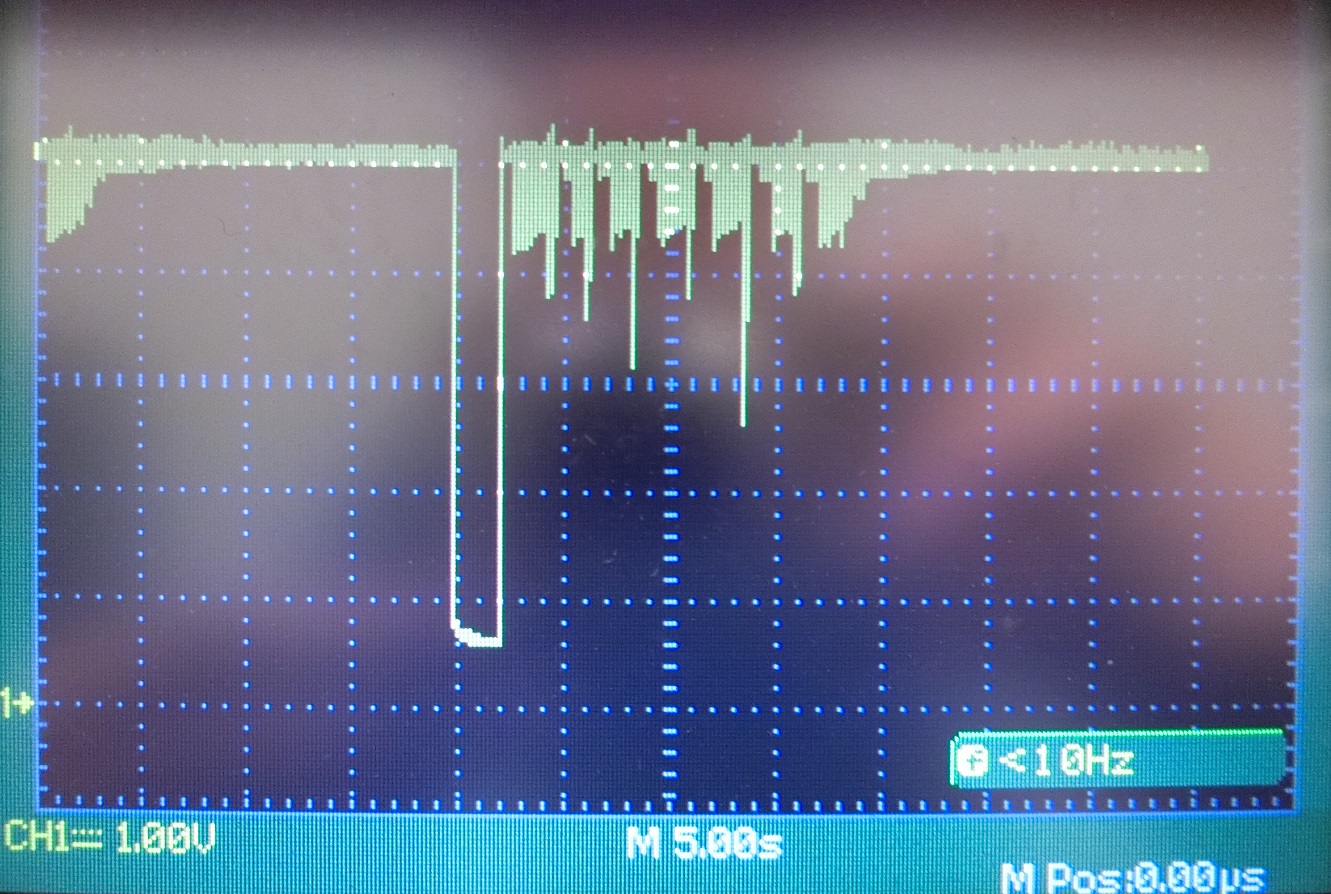
この為、100均で500円するアダプタ(2.4A+1A:合計3.4A)を購入し使用した結果、問題なく動作することを確認しました。(ESP概要で紹介)
全ピンでのPWM確認をしてみます。
まずは、入出力問題なく使用可能ピンで確認します、同ピンは以下の通りです。
GPIO 4、5、12、13、14、15、16、17、18、19、21、22、23、25、26、27、32、33 (18ピン)
GPIO 4: OK
GPIO 5: OK
GPIO 12: OK
GPIO 13: OK
GPIO 14: OK
GPIO 15: OK
GPIO 16: OK
GPIO 17: OK
GPIO 18: OK
GPIO 19: OK
GPIO 21: OK
GPIO 22: OK
GPIO 23: OK
GPIO 25: OK
GPIO 26: OK
GPIO 27: OK
GPIO 32: OK
GPIO 33: OK
問題なく動作しました。
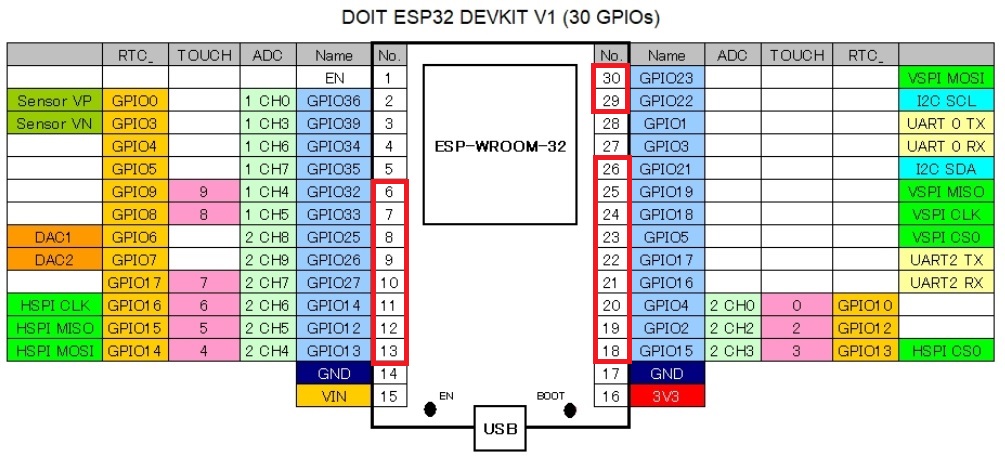
【DOIT ESP32 DEVKIT V1(30 GPIO)】での追加評価
下記が同ボードのピンアサインです。
結論から言えば、赤枠で囲ったピンは、入出力(PWMも含め)とも動作したピンです。
このボードは、プログラム書き込み時「BOOT」+「EN」操作が必要でタイミングがむつかしい。
ENとGND間に10μFのコンデンサを入れると上記操作が必要ないという記事もあり、後日確認予定です。
ENとGND間に10μFの電解コンデンサーを入れてテストしてみました。
コンパイル後、1秒程度して書込みが始まり無事成功しました。スイッチ操作は不要になり使い勝手が良くなりました。
ただ心配なのは、USBコネクターが貧弱で書込み中接触不良になる可能性があるので要注意です。先ずは一安心です。
数日使用してみましたが、USBポートをArduinoIDEは認識していますが下記書込み時ポートを認識できませんというエラーが出て何回かトライしていると
突然書込み成功するなどやはり不安定な面があります。(実験程度の使用にとどめましょう)