鉄道模型に興味は有ったが冷たい感じがしていた所、森のねんどで作られたジオラマ内を高度に制御された電車が走っているのを見て感動しました。
吉野杉の廃材を再利用した自然にやさしい「ねんど」でジオラマはじめ電車まで「ねんど」で作られています。
電車の制御は、DCC制御で高度に制御されている為、レール上に何台電車を置いても衝突することなく運行されます。
欠点は、非常にDCC制御は高価なのとシステムが一般公開されていないので自作出来ない事です。一部の有志でシステム解析し自作されている方もおられます
が、普及せす今だマイナーなシステムとなっています。
それと最大の欠点はレール給電です。
安定走行させようとすれば、1日1回はレール、車輪のクリーニングが必要で、これを怠るとレール上に車両が停止してしまいシステム全体が停止してしまい
個人が観賞用といて動かしている分には良いのですが、展示会場、商品等では問題です、出来ればメンテフリーが理想ですね。
鉄道模型博物館等では、メンテナンス専門の方が数人常駐されていてレール、車両のクリーニングは重要なお仕事となっています。
そこでレールからの給電は止めて車両に電源を持ち(コンデンサ)時々充電ステーション(駅、引込み線等)に入り電力補給し、制御通信はWiFi&Bluetooth
で行う事で接触不良によるパワー停止、制御情報停止によるトラブルは避ける事が出来ます。
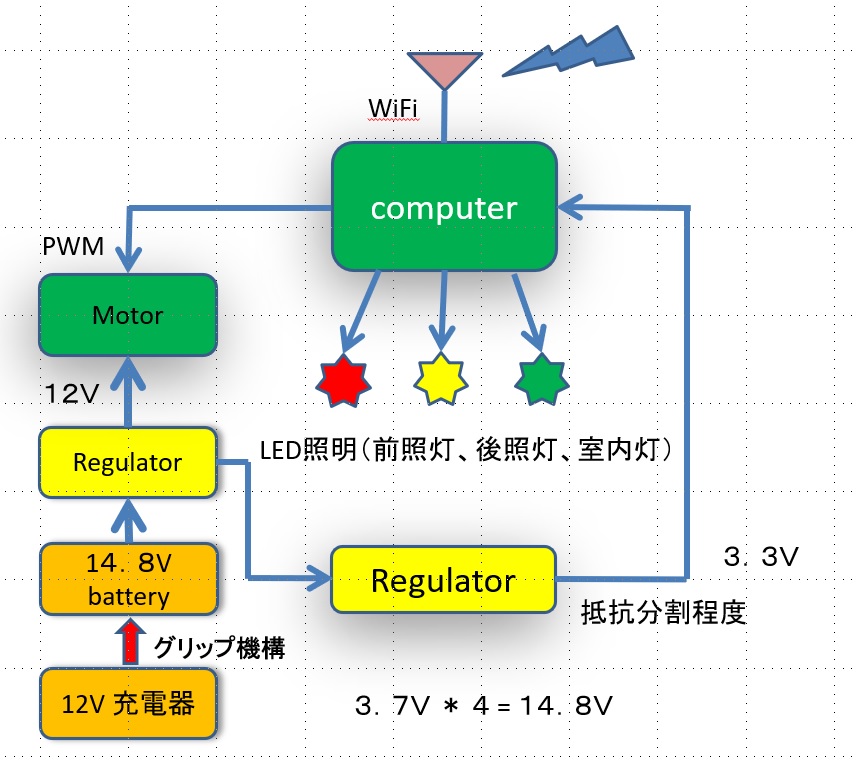
当初はバッテリーを搭載した物でしたが、電力ロスが大きいので3V~5V程度で再検討します。
できれば大容量キャパシタ(10F程度)で運用可能かを見極める。ジオラマサイズ横幅2m、縦1mを想定したコースを最低2周を目標にする。

キャパシタ10Fを2個直列につなぎ5V仕様とします。(但し容量は半分の5Fとなる)
レギュレーターは、1V強から6Vまでの入力に対して3.3Vの安定出力を出しESP32マイコンに供給します。
モーターへは直接コンデンサ電圧5Vを(安定化なし)印加するので、時間と共に電圧ドロップを考慮する必要があります。(ソフト処理)
次回からは、具体的な回路検討に入ります。